



工業機器人運動學標定與軌跡規劃虛擬仿真實驗指導書
1.計算機(Windows 及以上系統)
2.工業機器人運動學標定與軌跡規劃虛擬仿真軟件
3.實驗指導書、實驗報告模板
1.預習D-H建模方法、正逆運動學、運動學標定、軌跡規劃基本理論。
2.熟悉虛擬仿真平臺界面、功能模塊與操作邏輯。
1.進入虛擬仿真平臺,選擇標準 6 自由度工業機器人模型。
2.依據連桿結構,依次定義各連桿D-H參數。
3.構建齊次變換矩陣,完成正運動學建模,驗證末端位姿計算結果。
4.輸入目標末端位姿,完成逆運動學求解,記錄各關節角度。
1.建立名義模型:導入未補償的初始D-H參數模型。
2.誤差注入:在仿真系統中設置連桿長度、扭角、偏距、關節轉角誤差。
3.虛擬位姿測量:使用仿真激光跟蹤儀/視覺系統,采集機器人末端實際位姿。
4.誤差計算:對比理論位姿與實際位姿,計算位姿誤差e。
5.參數辨識:采用最小二乘法/卡爾曼濾波求解 D-H 參數誤差。
6.模型修正與補償:更新D-H參數,得到精確運動學模型。
7.標定驗證:對比標定前后定位誤差,驗證標定效果。
1.選擇標定后的精確模型,設置軌跡規劃約束(速度、加速度、安全范圍)。
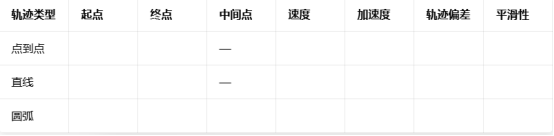
2.點到點軌跡規劃:設定起始點、目標點,完成關節空間軌跡規劃與仿真。
3.直線軌跡規劃:設定路徑點,完成笛卡爾空間直線軌跡生成與仿真。
4.圓弧軌跡規劃:設定起點、終點、中間點,完成圓弧軌跡規劃與仿真。
5.觀察軌跡平滑性、運動平穩性,記錄軌跡偏差。
1.分析標定誤差、軌跡偏差產生原因。
2.優化 D-H 參數與軌跡規劃參數,提升運動精度與平滑度。
3.導出實驗數據,完成結果對比與總結。
需記錄以下關鍵數據:
1.D-H 建模原始參數與修正后參數
2.標定前/后末端定位誤差值
3.點到點、直線、圓弧軌跡規劃參數
4.軌跡偏差、運動時間、平穩性評價
5.誤差辨識與補償關鍵參數
1.實驗前必須完成理論預習,嚴格按照虛擬平臺操作規范執行步驟。
2.D-H 參數定義需準確,避免坐標系建立錯誤導致建模失敗。
3.誤差注入、參數辨識時合理設置數值,保證仿真結果有效。
4.軌跡規劃需設置合理速度、加速度,防止機器人超限運動。
5.如實記錄實驗數據,不得篡改,保證實驗真實性。
1.寫明實驗名稱、目的、原理、設備與步驟。
2.附上實驗原始數據、仿真截圖、誤差對比曲線。
3.分析運動學建模、標定、軌跡規劃中出現的問題及解決方法。
4.總結實驗收獲,闡述運動學標定與軌跡規劃在工業機器人工程應用中的意義。
5.提出實驗改進建議與拓展思考。
1.預習情況(10%)
2.虛擬仿真操作規范性與完成度(40%)
3.實驗數據記錄與分析(30%)
4.實驗報告質量(20%)