工業機器人運動學標定與軌跡規劃虛擬仿真實驗原理
一、實驗總體原理
本虛擬仿真實驗以工業機器人串聯連桿運動學模型為基礎,先通過運動學標定修正機器人幾何參數誤差,再基于精確模型進行關節空間/笛卡爾空間軌跡規劃,最終在虛擬平臺上實現高精度、平滑、無碰撞的運動仿真,完成從“建模—標定—規劃—仿真驗證”的完整閉環。
二、工業機器人運動學建模原理
1.文字原理
工業機器人通常為串聯多剛體連桿機構,采用D-H 參數法(Denavit-Hartenberg) 建立連桿坐標系。
定義4個D-H參數:連桿長度a、連桿扭角α、連桿偏距d、關節轉角 θ。
通過齊次變換矩陣逐連桿相乘,得到正運動學方程:
已知末端位姿求解關節角,為逆運動學,是軌跡規劃的基礎。
三、運動學標定原理
1.文字原理
運動學標定的核心是辨識并修正 D-H 參數誤差,減小定位誤差。
誤差來源:加工裝配誤差、減速器間隙、連桿彈性變形、零位偏差等,導致名義模型與實際模型不一致。
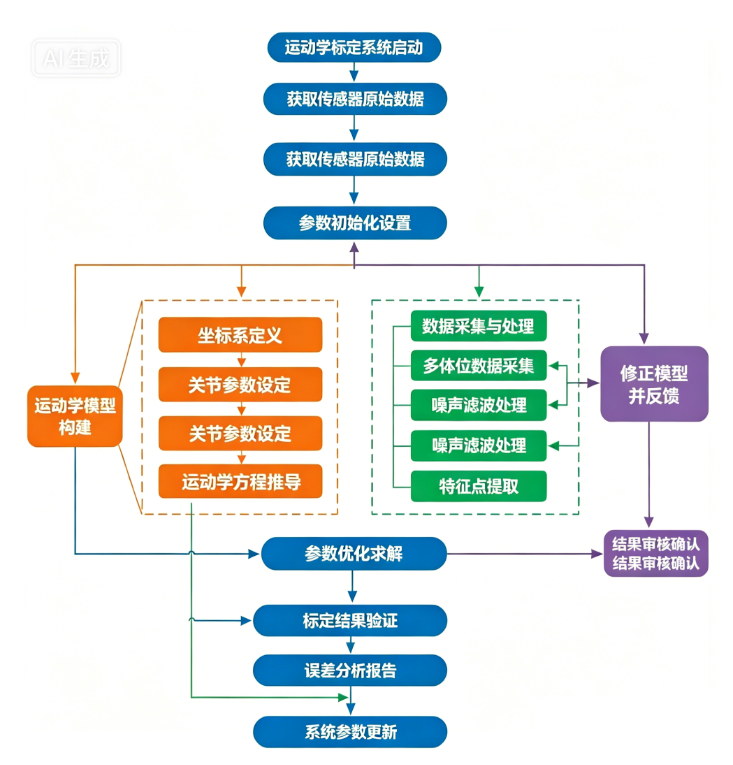
標定流程:
測量機器人末端實際位姿;
建立誤差模型,計算名義位姿與實際位姿偏差;
通過最小二乘法 / 卡爾曼濾波辨識參數誤差;
修正 D-H 參數,完成誤差補償。
虛擬仿真中通過設定 “名義模型→誤差注入→測量→辨識→補償” 流程復現標定全過程。
2.示意圖